|
|
一. 前言
本节介绍rviz如何显示机器人。
二. 更新编译代码
cd ros_program_melodicgit pullcd catkin_wscatkin_make这一步主要是为了保持本地代码与仓上一致。
三. 启动rviz显示机器人
1. 加载机器人模型:
roslaunch my_robot description.launch
已经介绍,不熟悉的同学可以再看看。
2. 启动gazebo:
roslaunch my_robot turtlebot3_empty_world.launch
已经介绍,不熟悉的同学可以再看看。
3. 启动rviz
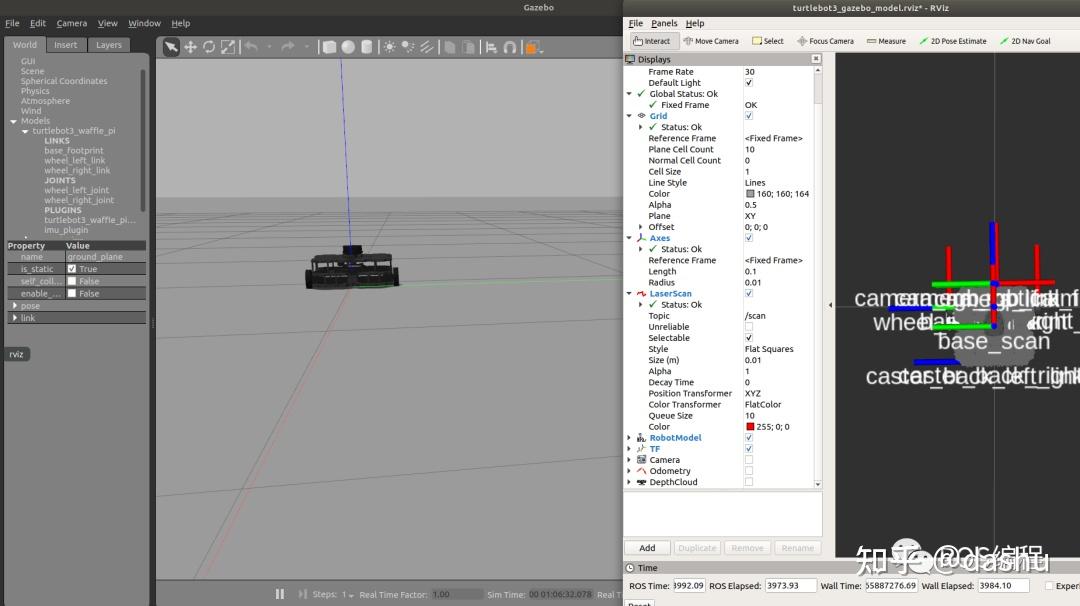
roslaunch my_robot turtlebot3_gazebo_rviz.launch启动rviz,整体效果如图
四. 文件解析
1. turtlebot3_gazebo_rviz.launch
启动rviz显示机器人,内容:
<launch>
<node pkg=&#34;robot_state_publisher&#34; type=&#34;robot_state_publisher&#34; name=&#34;robot_state_publisher&#34; />
<node name=&#34;rviz&#34; pkg=&#34;rviz&#34; type=&#34;rviz&#34; args=&#34;-d $(find my_robot)/rviz/turtlebot3_gazebo_model.rviz&#34;/>
<!-- <node name=&#34;rviz&#34; pkg=&#34;rviz&#34; type=&#34;rviz&#34; /> -->
</launch>第2行启动节点robot_state_publisher,此节点订阅gazebo发布的joint_states,然后发布tf和tf_static。第3行启动节点rviz,rviz节点订阅tf和tf_static,并使用参数robot_description,显示机器人。
2. turtlebot3_gazebo_model.rviz
rviz的配置文件,也可以不使用配置文件,单独启动rivz之后,再手动选择要显示的内容,然后可以选择保存配置文件。在文件turtlebot3_gazebo_rviz.launch中注掉第三行,打开第四行,即可单独启动rviz。
3.rviz显示
上图中,rviz显示机器人可分为两个部分,一个是类似gazebo显示的机器人模型,同样是通过robot_description找到mesh格式文件,显示出来;二是tf,即link和joint,可以视为机器人视野下的自己。这部分是通过订阅topic:tf和tf_static实现的。
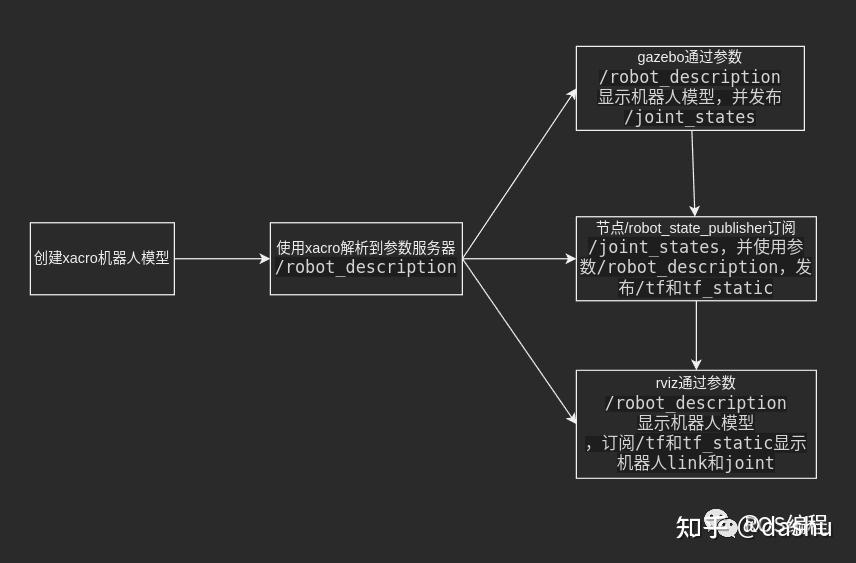
五. 小结
rviz显示机器人流程:
 |
|



 发表于 2022-12-5 09:00:20
发表于 2022-12-5 09:00:20